Pcomp, Wk 4: Labs
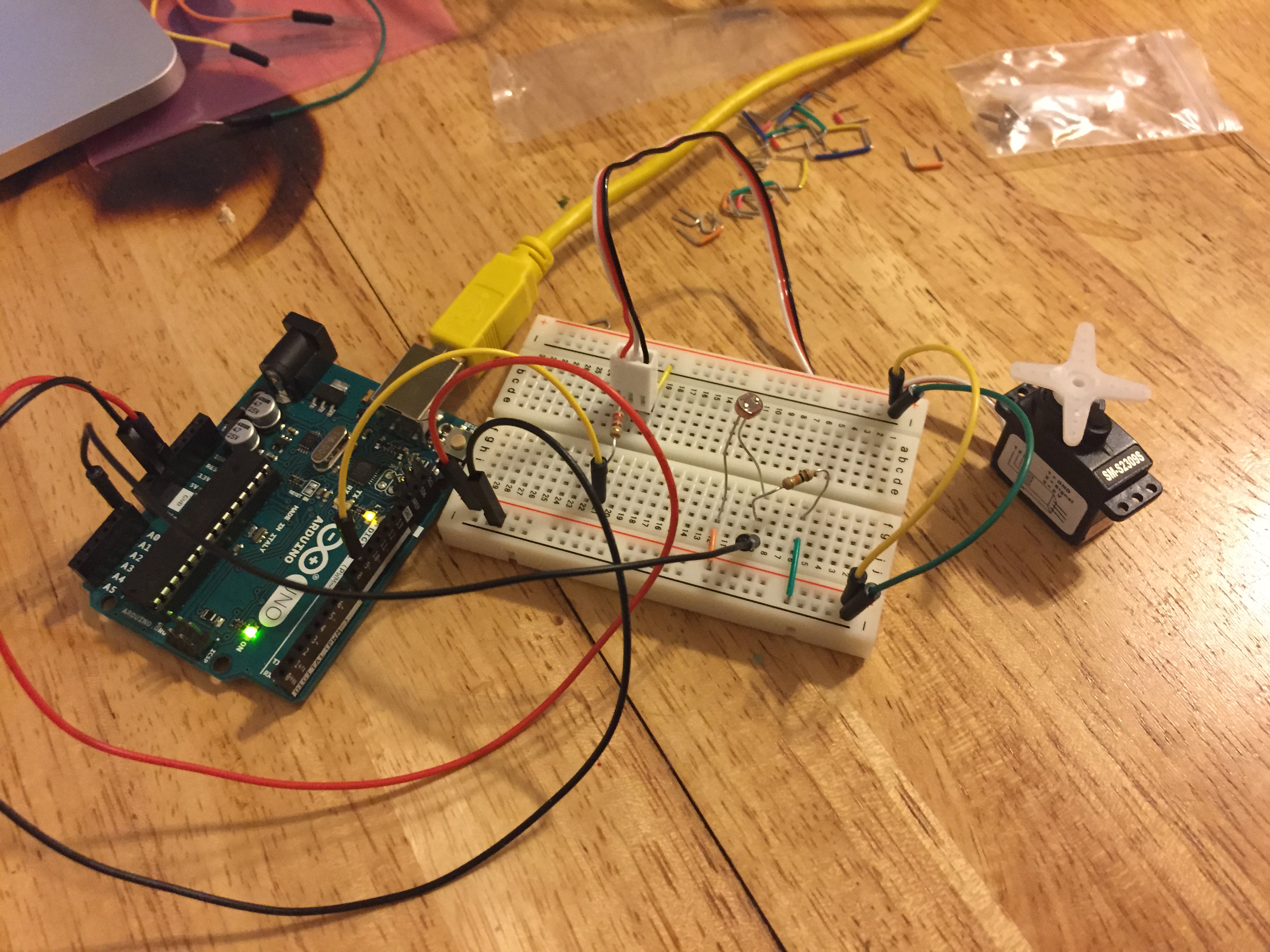
So I did the servo motor lab again and got it to turn! yay! What I took away from lab is our ability to use Arduino libraries, as well as a growing curiosity about controlling the position of an object. I was so intrigued by the servo motor’s capabilities that I decided to use them in my application (more on that in a different post).
When I began my tone output lab, the first thing I was perplexed by was the readings I got from the two photosensors. I would have figured that if I covered both of them up, then that would give the lowest reading and that if I uncovered them they would give the highest. However, if they were uncovered I got a reading around 640. if I covered the one connected to power, I got readings around 230 and if I covered the one connected to ground I got readings around 900 – is it because they’re working as a sort of voltage divider?
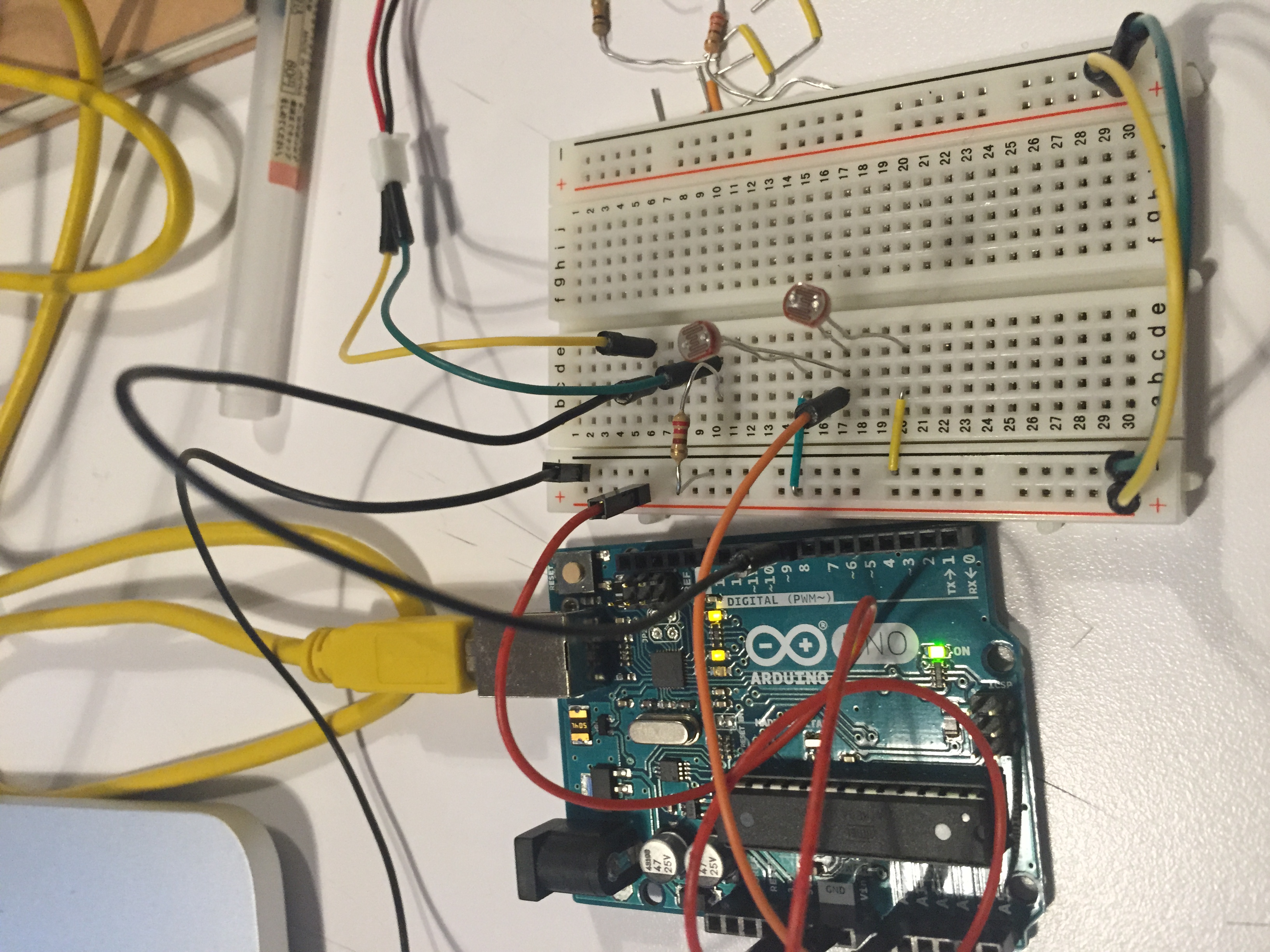
Setup for Tone Output Lab with two photosensors
The sensor readings (obviously) affected the output of the pitch, as well and the volume (or was it the pitch?) mirrored the readings. I checked with Paula’s to see if her’s did the same…and it is. So, in conclusion…I need to understand variable resistors more.
I also tried another photosensor and the same pattern emerged (although with slightly different ranges). So, basically, I just want to know if this supposed to happen this way and why?
Next, I moved on to the melody portion of the lab. This was a good lesson in correctly copying someone else’s code and checking through syntax for errors. Once I figured out my errors, it played the “shave and haircut” melody! Huzzah!
Then I did the last part of the lab with the FSRs. Cool to see that the code uses an array, since we just started to learn about those in ICM. Once I got them to output specific notes, I played around with the different notes assigned to the sensors and made up my own melody!
IMG_4479 from Zoe Bachman on Vimeo.
Pingback: PComp, Wk 4: Simple Application – Drawing Machine | itp blog